16. RV-C Ondersteuning
16.1. RV-C Introductie
Victron ondersteunt het RV-C protocol, vanaf Venus OS firmware v2.90
Wat is het RV-C protocol?
RV-C (Recreational Vehicle-CAN) is een CAN-bus gebaseerd communicatieprotocol, vergelijkbaar met NMEA 2000 voor boten. Het wordt veel gebruikt in de VS om onderdelen en apparaten van campers met elkaar te laten communiceren.
RV-C heeft twee hoofd functies:
RV-C uit: Hiermee kunnen Victron apparaten worden bewaakt en bediend via een RV-C bedieningspaneel.
RV-C in: laat Victron GX apparaten toe gegevens te ontvangen en weer te geven van compatibele RV-C apparaten van derden.
Samengevat, als deze functie is ingeschakeld met het GX apparaat aangesloten op een RV-C netwerk, dan kan een RV-C bedieningspaneel de Victron gegevens lezen bijv. van een BMV of een omvormer/acculader en deze aan de gebruiker tonen of zelfs enkele ervan bedienen. Compatibele RV-C apparaten worden gelijktijdig weergegeven op het GX apparaat.
RV-C is gebouwd op SAE J1939.
16.2. Beperkingen
VE.Can apparaten
De RV-C en VE.Can protocollen zijn niet compatibel. Een VE.Can poort op een GX apparaat kan worden ingesteld voor het VE.Can profiel of het RV-C profiel, niet voor beide tegelijk.
Sommige GX apparaten hebben slechts één volledig functionele VE.Can poort. Als een RV-C verbinding vereist is, beperkt dit dus welke andere apparaten gebruikt kunnen worden in het systeem.
Typische RV gerelateerde producten die daarom niet in de hierboven beschreven situatie kunnen worden gebruikt:
De Lynx Smart BMS en Lynx BMS NG kunnen niet worden gebruikt, omdat hiervoor een VE.Can verbinding nodig is. Gebruik in plaats daarvan een VE.Bus BMS (wordt aangesloten via VE.Bus).
De Lynx Smart Shunt is niet compatibel; gebruik in plaats daarvan een SmartShunt (wordt aangesloten via VE.Direct).
De dynamoregelaar van Wakespeed kan niet worden bewaakt via het GX apparaat.
MPPT laadregelaars met hoog vermogen moeten worden aangesloten via VE.Direct, niet via VE.Can.
Compatibiliteit GX apparaat
Afhankelijk van het systeemontwerp beïnvloedt deze beperking de keuze van het GX apparaat:
Color Control GX (CCGX), MultiPlus-II GX en EasySolar-II GX: elk heeft slechts één VE.Can poort, die kan worden ingesteld voor VE.Can of RV-C, niet voor beide. Er kan bijvoorbeeld niet tegelijkertijd een Lynx Smart BMS gebruikt worden én verbinding gemaakt worden met een RV-C netwerk.
Cerbo GX & Cerbo-S GX: Net als hierboven hebben deze modellen slechts één volledig functionele VE.Can poort. Nogmaals, het is of VE.Can of RV-C, niet allebei.
Opmerking
Opmerking: De BMS-Can poort op de Cerbo GX is beperkt en kan niet worden gebruikt voor RV-C.
Cerbo GX MK2: Bijna identiek aan de Cerbo GX, maar met twee VE.Can poorten, waardoor gelijktijdige verbinding met zowel VE.Can als RV-C netwerken mogelijk is.
Venus GX: uitgerust met twee VE.Can poorten, waardoor gelijktijdige verbinding met zowel VE.Can als RV-C netwerken mogelijk is.
Ekrano GX: Heeft ook twee VE.Can poorten en kan tegelijkertijd op zowel VE.Can als RV-C worden aangesloten.
16.3. Ondersteunde apparaten
Vanaf Venus OS v2.90 is ondersteuning voor RV-C uitvoer toegevoegd voor een reeks Victron producten. De volgende apparaten worden ondersteund:
Victron product | Opmerkingen |
|---|---|
VE.Bus omvormer / acculader | Omvormer- en acculader functies kunnen afzonderlijk worden geregeld (aan/uit) via RV-C. De limiet voor walstroom kan ook worden ingesteld. |
Smart IP43Charger 120-240 V | Kan geactiveerd/gedeactiveerd (aan/uit) worden via RV-C. Ook walstroom kan ingesteld worden. |
Smart IP43 Charger 230 V | Alleen lezen via RV-C. Kan niet worden geregeld. |
Skylla-i en Skylla-IP44/IP65 | Vereist twee volledig functionele CAN-bus interfaces. Momenteel alleen ondersteund door Venus GX, Cerbo GX MK2 en Ekrano GX. |
VE.Direct Inverter | |
Inverter Smart en Inverter RS | |
PV laders incl. MPPT RS | |
Accu's:
| |
Tanks: Gegevens over het tankniveau worden ondersteund vanuit de volgende invoer bronnen:
|
16.4. RV-C Instellingen
RV-C wordt ingesteld via het GX apparaat:
Zodra het RV-Cprofiel is geselecteerd, wordt het actief en wordt het eerder geselecteerde profiel gedeactiveerd (bijbehorende apparatuur zoals VE.Can apparaten zijn dan niet meer beschikbaar in de GUI). |    |
16.4.1. Instelling van RV-C uit apparaten
RV-C uit apparaten worden ingesteld vanuit het Devices submenu in het VE.Can poort menu. | |
Het apparaten submenu bevat alle apparaten van het RV-C netwerk inclusief RV-C uit apparaten. Deze laatste worden geïdentificeerd door hun [VRM# instance], die gebruikt kan worden om de "echte" apparaten te bepalen vanuit het hoofdmenu van het GX apparaat. Het hexadecimale getal aan de rechterkant is het bronadres. |  |
Als het submenu van een RV-Capparaat geopend wordt, dan is er algemene informatie over het RV-Capparaat te zien en, nog belangrijker, het configuratiemenu als er naar beneden gescrold wordt naar de onderkant van de pagina. Het bekijken van het instellingenmenu vereist minstens gebruiker- en installateur toegangsniveau, raadpleeg hoofdstuk Menustructuur en instelbare parameters. |  |
De instance voor de overeenstemmende DGN's kan gewijzigd worden in het instellingen submenu. |  |
16.5. Ondersteuning Garnet SeeLeveL II 709RVC & Victron GX apparaat
Met RV-C ondersteuning in Venus OS kunnen de Garnet SeeLeveL 709-RVC en SeeLeveL Soul worden gebruikt om gegevens over het tankniveau weer te geven op zowel het GX apparaat als de VRM. Alle 709-RVC modellen en de SeeLeveL Soul zijn compatibel met de GX.
Beperkingen
Als een CAN-bus poort op een GX apparaat is geconfigureerd voor RV-C, kan deze niet tegelijkertijd worden gebruikt voor VE.Can of NMEA 2000 functies. Het is of VE.Can/NMEA 2000 of RV-C, niet allebei op dezelfde poort.
Apparaten zoals de Venus GX, Cerbo GX MK2 en Ekrano GX, die twee volledig functionele VE.Can poorten hebben, ondersteunen het parallel geschakeld uitvoeren van VE.Can en RV-C.
Als het gebruik van RV-C essentiële VE.Can verbindingen op het GX apparaat blokkeert, wordt aanbevolen om in plaats daarvan de Garnet SeeLeveL 709-N2K te gebruiken, die communiceert via NMEA 2000 en deze beperkingen vermijdt.
Tank niveaus die worden weergegeven op het GX apparaat (en de VRM) worden alleen weergegeven als percentages. Het systeem geeft het volume niet weer in liters, gallons of andere eenheden.
16.5.1. De Garnet SeeLeveL II 709-RVC tankniveausensor bedrading met een GX apparaat
Voordat er verbinding gemaakt wordt met een GX apparaat, moet ervoor gezorgd worden dat de Garnet SeeLeveL 709-RVC geïnstalleerd en ingesteld is volgens de installatie instructies van Garnet.
Het GX apparaat heeft een RJ45 connector nodig op de VE.Can poort, terwijl het Garnet SeeLeveL paneel meestal een van beide heeft:
Een multipin RV-C connector, of
Een bedrade aansluiting met een zwarte, een blauwe en een witte draad.
Om de twee met elkaar te verbinden, moet een adapter kabel worden gemaakt op basis van de onderstaande pin toewijzingen.
Een standaard CAT5 Ethernet kabel is goed geschikt voor dit doel. Het ene uiteinde van de kabel wordt afgesneden en aangesloten op de draden van het Garnet paneel, terwijl de RJ45 plug aan het uiteinde van het GX apparaat blijft.
Kleurcode Garnet paneelkabel | RV-C aansluitstuk | Victron VE.Can RJ45 | Kleurcode CAT5Ethernet kabel | Signaal |
|---|---|---|---|---|
Zwart | 4 | 3 | Groen/wit | Aarding |
Blauw | 3 | 8 | Bruin | CAN-L |
Wit | 2 | 7 | Bruin/wit | CAN-H |
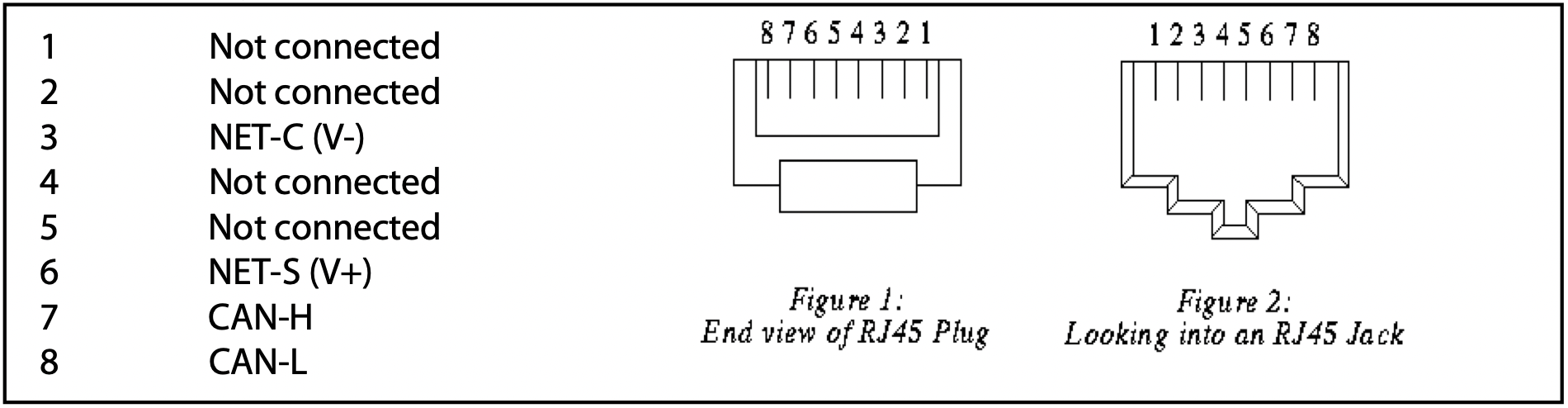 |
Victron VE.Can pen bezetting
16.5.2. Installatie en instellingen
Stuur de kabel van het Garnet paneel naar het GX apparaat.
Zorg ervoor dat zowel het Garnet paneel als het GX apparaat uitgeschakeld zijn.
Verbind de RJ45 plug met de VE.Can poort van het GX apparaat en het andere uiteinde van de adapter kabel met het Garnet paneel.
Controleer bus afsluiting:
Gebruik voor het GX apparaat de meegeleverde blauwe VE.Can RJ45 afsluiter.
Een goede afsluiting is verplicht, vooral als de Garnet SeeLeveL het enige RV-C apparaat op de bus is.
Zodra alles is aangesloten, schakel dan beide apparaten in.
Voltooi de installatie door de stappen in het RV-C Instellinge hoofdstuk te volgen om de VE.Can poort in te stellen voor het RV-C profiel.